Vision-Guided Stepper Motor System
Motion Control – Python / C / OpenCV
This project was a red object tracking system I built using a webcam to control a 28BYJ-48 stepper motor in real time.
The system was controlled by a Cypress PSoC 5LP microcontroller, which ran C code for stepper motor control, PWM signal generation, and UART communication with the PC.
A Python script on a PC processed webcam images to detect red objects, computed motor speed and direction using a PID algorithm, and transmitted commands to the PSoC.
The project combines embedded control, digital logic design, and computer vision in a compact prototype.
Stepper Motor Digital Logic
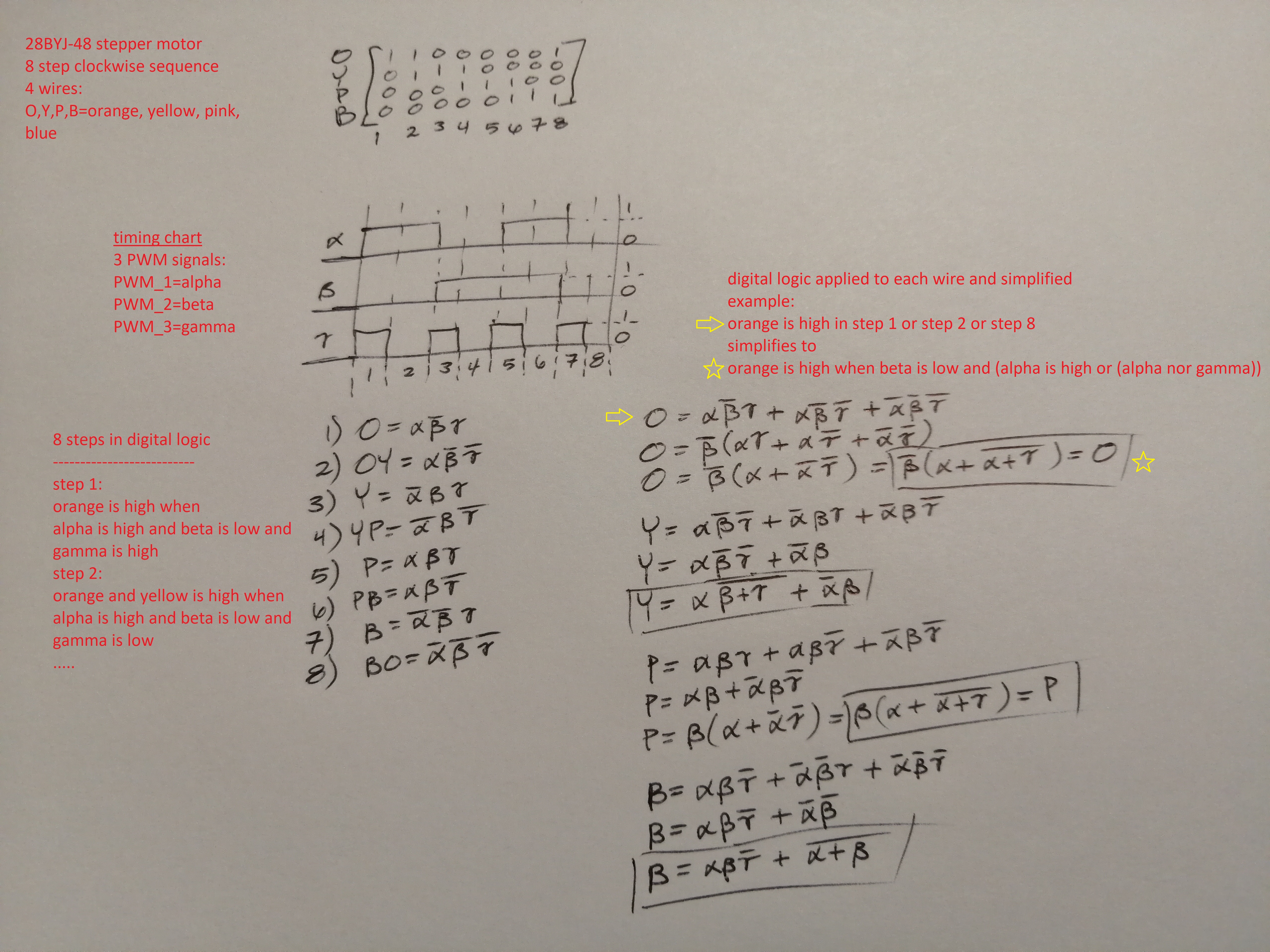
Handwritten notes and diagrams describing the digital logic applied to the stepper motor.
- Shows 8-step sequence for a 28BYJ-48 stepper (orange, yellow, pink, blue coils).
- Timing chart for 3 PWM signals (alpha, beta, gamma).
- Simplified digital logic equations for each coil.
PSoC Circuit Design
Circuit diagram created in Cypress software showing:
- Clock input driving 3 PWM blocks.
- Logic gates implementing the simplified stepper equations.
- Outputs connected to 4 stepper coils (O, Y, P, B).
- UART and LCD blocks integrated for communication and display.
Python Object Tracking
Python script processes webcam frames to isolate red objects, calculate horizontal position, and compute motor speed/direction using a proportional controller. Commands are sent to the PSoC in 3-byte UART format.
Embedded C Stepper Control
C script running on the PSoC receives motor commands from the Python script and drives the stepper motor via 3 synchronized PWM signals. The LCD shows current speed and direction.
Video Demonstration
The stepper motor tracks a moving red object in real time, including a twist-off bottle cap, a handheld red pen, and small, thrown pieces of wire, demonstrating the system’s ability to follow objects of varying size and speed.