DBSCAN NYC
3D Point Cloud Data - Python
| Before DBSCAN | After DBSCAN |
|---|---|
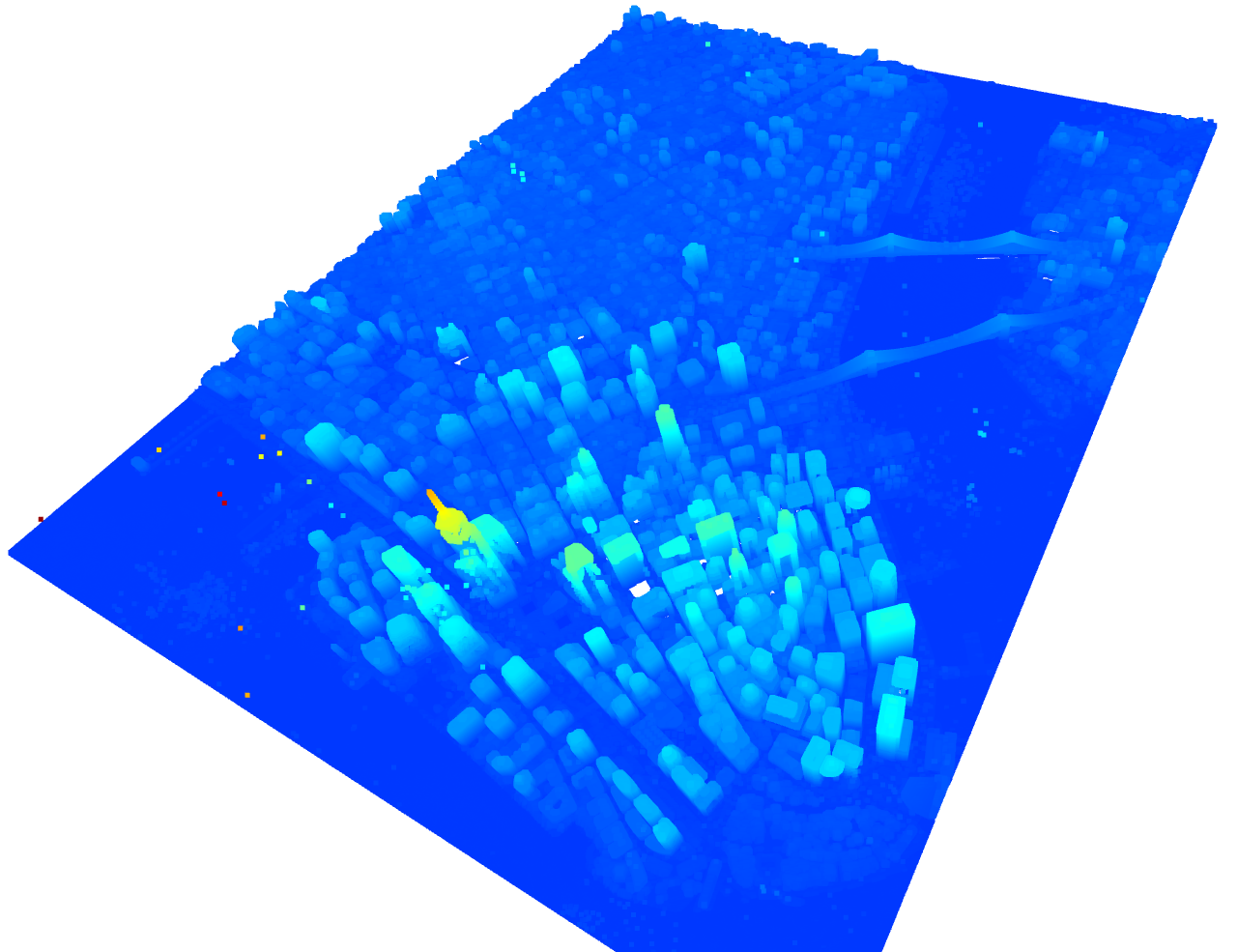 |
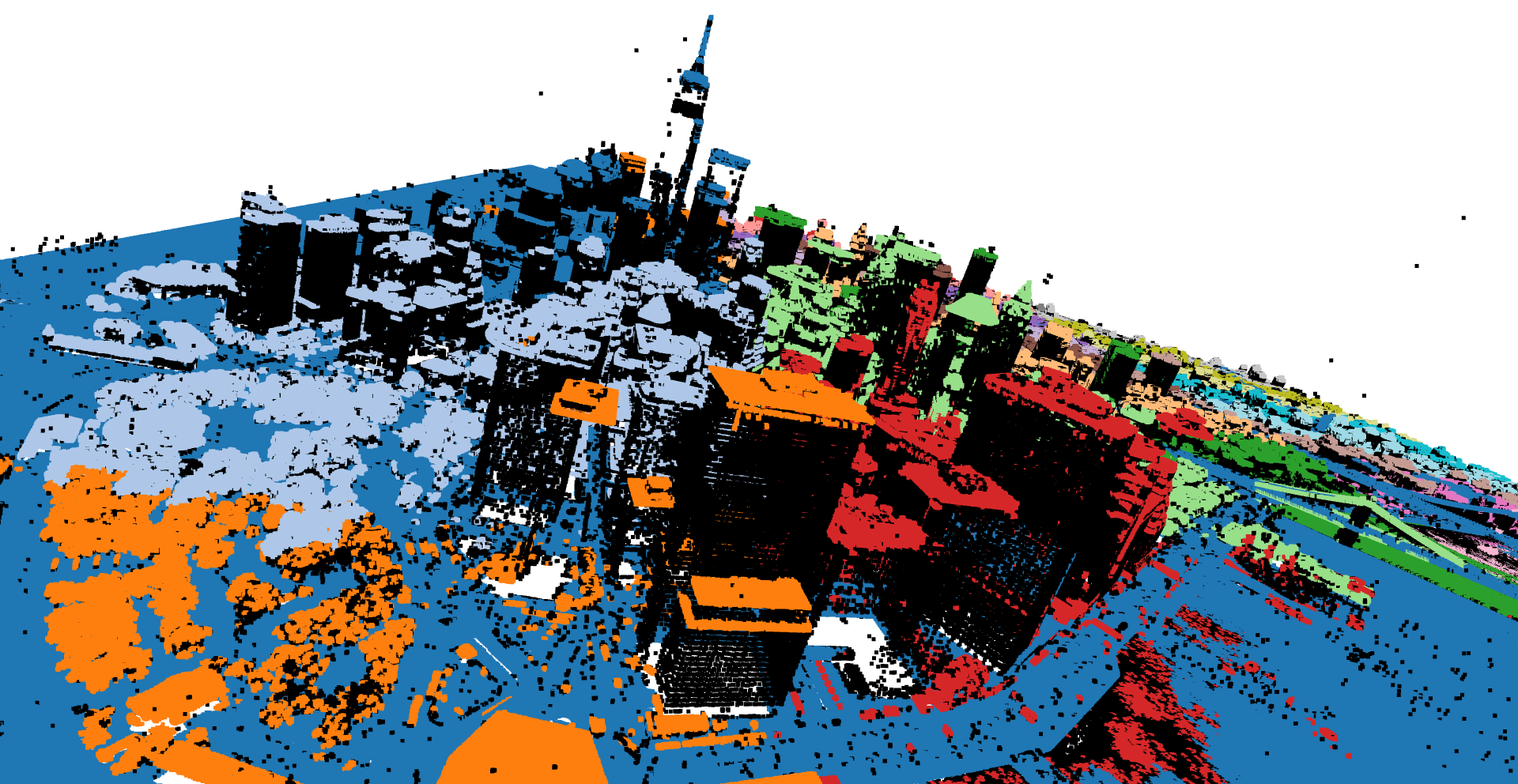 |
Project Summary
This project applies the DBSCAN (Density-Based Spatial Clustering of Applications with Noise) algorithm to 3D LiDAR data of Lower Manhattan, New York City. The workflow used CloudCompare, Python, and Open3D for preprocessing, clustering, and visualization.
Demonstration Video
The video shows the LiDAR point clouds in their original form in CloudCompare, then in Open3D before and after DBSCAN clustering.
Python Script
Additional Information
Sources for the original LiDAR datasets can be found on the Point Cloud Sources page.